Effiziente Algorithmen und Datenstrukturen II
EA2的笔记
(感谢fy的课后辅导)
Introduction to Linear Programming (LP)
给定$m$个对于$n$个自变量的约束条件, 要求在满足这些约束条件的前提下, 最大化收益.
标准的LP形式:
以数组的形式:
其中$Ax=b$指出了自变量$x$需要满足的条件, 而$c^Tx$就是收益计算方式, 他给每一个自变量$x_j$一个权值$c_j$.
当然, LP也有除了等号的标准形式:
- 求最小值: $\begin{array}{rr} & \min \left( c^T x \right) \ & \text { s.t. } A x=b \ & x \geq 0\end{array}$
- 最大化约束: $\begin{array}{rr} & \max \left( c^T x \right) \ & \text { s.t. } A x \leq b \ & x \geq 0\end{array}$
- 最小化约束: $\begin{array}{rr} & \max \left( c^T x \right) \ & \text { s.t. } A x \geq b \ & x \geq 0\end{array}$
我们可以很容易地从一个形式转换成另一个形式:
- 小于等于变等于: $a-3 b+5 c \leq 12 \Rightarrow \begin{aligned} a-3 b+5 c+s & =12 \ s & \geq 0\end{aligned}$
- 大于等于变等于: $a-3 b+5 c \geq 12 \Rightarrow \begin{aligned} a-3 b+5 c-s & =12 \ s & \geq 0\end{aligned}$
- 最小值转最大值: $\min \left( a-3 b+5 c \right) \Rightarrow \max \left( -a+3 b-5 c \right)$
- 等于转小于等于: $a-3 b+5 c=12 \Rightarrow \begin{gathered}a-3 b+5 c \leq 12 \ -a+3 b-5 c \leq-12\end{gathered}$
- 等于转大于等于: $a-3 b+5 c=12 \Rightarrow \begin{gathered}a-3 b+5 c \geq 12 \ -a+3 b-5 c \geq-12\end{gathered}$
- 未限制转非负: $x$ unrestricted $\Rightarrow x=x^{+}-x^{-}, x^{+} \geq 0, x^{-} \geq 0$
Definition 1 (Linear Programming Problem (LP))
已知 $A \in \mathbb{Q}^{m \times n}, b \in \mathbb{Q}^m, c \in \mathbb{Q}^n, \alpha \in \mathbb{Q}$, 问是否存在 $x \in \mathbb{Q}^n$ s.t. $A x=b, x \geq 0$, 使得 $ c^T x \geq \alpha$ ?
LP $\in$ NP / co-NP / P ?
- LP是NP问题吗?
- LP是co-NP问题吗?
- LP是P问题吗?
输入
$n$是自变量的数量, $m$是约束条件的数量, $L$是编码输入需要的bit.
LP的几何意义


一些额外的定义
对于一个满足条件的自变量的集合 $P={x \mid A x=b, x \geq 0}$:
- $P$ 被称作可行域(feasible region)
- $P$ 中的一个点$x \in P$被称作可行解(feasible point)
- 如果 $P \neq \varnothing$ , 那这个LP就被称作可解的(feasible), 否则就是无解的(infeasible)
- LP是有界的(bounded)如果它是有解的并且
- 所有可行解 $x \in P$ , $c^T x<\infty$
- 所有可行解 $x \in P$ , $c^T x>-\infty$
Definition 2
给定向量或者点 $x_1, \ldots, x_k \in \mathbb{R}^n$ , $\sum \lambda_i x_i$:
- 线性组合(linear combination), 如果 $\lambda_i \in \mathbb{R}$
- 仿射组合(affine combination), 如果 $\lambda_i \in \mathbb{R}$ 并且 $\sum_i \lambda_i=1$
- 凸组合(convex combination), 如果 $\lambda_i \in \mathbb{R}$, $\sum_i \lambda_i=1$ 并且 $\lambda_i \geq 0$
- 锥组合(conic combination), 如果 $\lambda_i \in \mathbb{R}$ 并且 $\lambda_i \geq 0$
Definition 3 & 4
集合$X \subseteq \mathbb{R}^n$是:
- $span(X)$ : 线性子空间(linear subspace), 如果它在线性组合下是个闭集(closed set)
- $aff(X)$ : 仿射子空间(affine subspace), 如果它在仿射组合下是个闭集
- $conv(X)$ : 凸包(convex), 如果它在凸组合下是个闭集
- $cone(X)$ : $凸锥(convex cone), 如果它在锥组合下是个闭集
Definition 5
函数 $f: \mathbb{R}^n \rightarrow \mathbb{R}$ 是(向下)凸(convex)的, 如果对于所有的 $x, y \in \mathbb{R}^n$ 和 $\lambda \in[0,1]$ , 满足如下:
Lemma 6
如果 $P \subseteq \mathbb{R}^n$ , $f: \mathbb{R}^n \rightarrow \mathbb{R}$ 是凸的, 那么 $Q={x \in P \mid f(x) \leq t}$ 也是凸的
Definition 7
仿射子空间 $A \subseteq \mathbb{R}^n$ 的维数 $dim(A)$ , 是在 $A$ 中任取一点 $a \in A$ 后, 向量空间 ${x-a \mid x \in A}$ 的维数.
把仿射子空间平移到原点之后的空间的维数.
Definition 8
对于集合 $X \subseteq \mathbb{R}^n$ , $dim(X)$ 的维数和 $aff(X)$ 的维数相同.
Definition 9
集合 $H \subseteq \mathbb{R}^n$ 是一个超平面(hyperplane), 如果存在向量 $a \neq 0$ , $H={x \mid a^T x=b}$.
$a$ 是比当前空间低一维的维度的法向量的方向. 例如: 当前空间是二维平面, 那么 $a$ 就是直线的法向量 ; 当前空间是三维空间, 那么 $a$ 就是平面的法向量. $b$ 是比当前空间低一维的维度的截距, 这是一个有向距离.
Definiation 10
集合 $H^{\prime} \subseteq \mathbb{R}^n$ 是一个(闭)半空间, 如果存在向量 $a \neq 0$ , $H={x \mid a^T x \leq b}$
$a$ 的反方向, 以超平面为界的维度空间
Definition 11
polytop是一个集合 $P \subseteq \mathbb{R}^n$ , 满足 $P=\operatorname{conv}(X)$ , $|X|=c$.
Definition 12
polyhedron是一个集合 $P \subseteq \mathbb{R}^n$ , 这个集合可以被表示成若干个半空间的交集 ${H\left(a_1, b_1\right), \ldots, H\left(a_m, b_m\right)}$, $H\left(a_i, b_i\right)={x \in \mathbb{R}^n \mid a_i x \leq b_i}$
Definition 13
polyhedron $P$ 是有界的(bounded), 如果所有 $x \in P$ , 存在 $B$ , 使得 $|x|_2 \leq B$
Theorem 14
$P$ 是一个有界的polyhedron $\iff$ $P$ 是一个polytop
Definition 15
给定 $P \subseteq \mathbb{R}^n, a \in \mathbb{R}^n$ 和 $b \in \mathbb{R}$. 超平面 $H(a, b)={x \in \mathbb{R}^n \mid a^T x=b}$ 是一个 支撑超平面(supporting hyperplane), 如果 $\max {a^T x \mid x \in P}=b$
那些贴在凸包上的超平面
Definition 16
给定 $P \subseteq \mathbb{R}^n$. $F$ 是一个 $P$ 的face, 如果 $F=P$ 或者对于一些支撑超平面 $H$ , $F=P \cap H$ .
Definition 17
给定 $P$ :
- $v$ 是 $P$ 的一个端点(vertex), 如果 ${ v }$ 是 $P$ 的face
- $e$ 是 $P$ 的一条边(edge), 如果 $e$ 是 $P$ 的face, 并且 $dim(e)=1$
- $F$ 是 $P$ 的一个面(facet), 如果 $F$ 是 $P$ 的face, 并且 $dim(F)=dim(P)-1$
Definition 18
另一种vertex的判断方法:
给定一个polyhedron $P$. 一个点 $x \in P$ 是一个端点(vertex), 如果对于所有的 $y \in P, y \neq x$, $\exists c \in \mathbb{R}^n$ 满足 $c^T y<c^T x$
Definition 19
给定一个polyhedron $P$. 一个点 $x \in P$ 是一个极值点(extreme point), 如果 $\nexists a, b \neq x, a, b \in P$, 满足 $\lambda a+(1-\lambda) b=x$ for $\lambda \in[0,1]$.
不存在与 $x$ 共线并且在 $x$ 两侧的点 $a$ 和 $b$
Definition 20
端点是极值点
Observation
LP的可行域是一个ployhedron
Theorem 21
如果标准形式的LP存在最优解, 那么一定存在一个是极值点的最优解
如果 $x$ 是一个非极值点的最优解
假设有一个向量 $d \neq 0$ , $x \pm d \in P$
$\Rightarrow A \cdot (x \pm d)=b \Rightarrow A \cdot d=0$
在 $d$ 和 $-d$ 中取一个使 $c^T \cdot d’ > 0 \quad (d’ = d \text{ or } -d)$ 的, 作为正方向 $d$. 这是一定可以取到的, 因为 $d \neq 0$ , 若 $c^T \cdot d < 0$, 那么 就一定有 $c^T \cdot d > 0$
现在考虑从 $x$ 出发, 在射线 $x$ 到 $x+d$ 上的点 : $x+\lambda d, \lambda>0$
Case 1: $\exists j$ s.t. $d_j<0$
Notation
$B \subseteq{1 \ldots n}$ 是列索引的集合, $A_B$是 $A$ 中索引在 $B$ 里的列的集合
Theorem 22
给定集合 $P={x \mid A x=b, x \geq 0}$. 对于一个 $x \in P$, 定义 $B={j \mid x_j>0}$. 那么 $x$ 是极值点当且仅当 $A_B$ 有线性无关的列.
$\Leftarrow$
假设 $x$ 不是极值点
那就存在一个向量 $d \neq 0$ , 使得 $x \pm d \in P$
$\Rightarrow A \cdot (x \pm d)=b \Rightarrow A \cdot d=0 \Rightarrow A\text{ 中的列是线性相关的}$
定义 $B^{\prime}={j \mid d_j \neq 0}$
根据矩阵乘法, $A \cdot d = \sum_i \text{A的第} i \text{列} \cdot d_i$ , 而如果 $d$ 的第 $i$ 个元素是 $0$, 那么他就不会对结果产生贡献.
所以 $A \cdot d$ 的结果其实就是 $A_{B’}$ 中的列依次去乘 $d$ 中的非零元素 (这两者的数量应该是相等的), 乘出来的结果也是 $0$
所以 $A_{B’}$ 的列也是线性相关的
如果对于某个索引 $j$ , $x_j=0 \Rightarrow d_j=0$ , 这是因为有 $x_j \geq 0$ 这个条件.
因此 $B^{\prime} \subseteq B$ , 所以 $A_B$ 的列也必然是线性相关的
$\Rightarrow$
假设 $x$ 是极值点的时候, $A_B$ 是线性相关的
那么就必定存在 $d \neq 0$ , 使得 $A_B \cdot d=0$
将 $d$ 扩展到 $\mathbb{R}^n$ (原本 $d$ 中是只含有 $B$ 中的位置的值的, 现在给其他位置填充 $0$ )
那么 $A \cdot d = 0$
所以对于足够小的 $\lambda$ 有 $x \pm \lambda d \in P$ , 因此 $x$ 不是一个极值点, 与假设矛盾
Theorem 23
给定 $P={x \mid A x=b, x \geq 0}$ , 对任意 $x \in P$ , 我们定义 $B={j \mid x_j>0}$ . 如果 $A_B$ 的列是线性无关的, 则 $x$ 是 $P$ 的一个端点(vertex).
定义 $c_j= \begin{cases}0 & j \in B \ -1 & j \notin B\end{cases}$
则 $c^T \cdot x=0$ , 对于其他点 $y \in P$ , $c^T \cdot y \le 0$ (因为 $c$ 是非正的)
根据端点的定义(Definition 18), 如果 $x$ 是端点, 我们必须证明: $\forall y, c^T \cdot y = 0 \Rightarrow x=y$
我们假设 $c^T y=0$ , 则如果 $j \notin B$ , $y_j=0$ 必须满足, 否则结果里面就会出现 $-1$
因为 $y \in P$ , 所以有 $Ay=b$ , 对于 $y$ 中不属于 $B$ 的索引对应的元素, 不会对结果产生贡献, 因为他们是 $0$ , 所以有 $Ay=b=A_B \cdot y_B$ . 对于 $x$ 中不属于 $B$ 的索引对应的元素同理. 所以有 $Ay=b=A_B \cdot y_B = Ax=A_B \cdot x_B$
移项之后能得出: $A_B\left(x_B-y_B\right)=0$
因为 $A$ 的列是线性无关的, 所以 $x_B - y_B$ 一定得是 $0$ (线性无关的定义)
于是就证出了 $\forall y, c^T \cdot y = 0 \Rightarrow x=y$
所以在 $A_B$ 的列是线性无关的条件下, 对于我们构建的 $c$ , $\nexists y \neq x , c^T \cdot y \ge c^T \cdot x$ , 所以 $x$ 必定是端点.
Observation
对于一个LP问题, 我们能够假设矩阵 $A$ 是行满秩的, 即 $\operatorname{rank}(A)=m$
Theorem 24
给定 $P={x \mid A x=b, x \geq 0}$ , $x$ 是极值点当且仅当存在 $B \subseteq{1, \ldots, n}$ , 满足 $|B|=m$ 并且:
- $A_B$ 是非奇异的
- $x_B=A_B^{-1} b \geq 0$
- $x_N=0$
定义 $N={1, \ldots, n} \backslash B$
Basic Feasible Solutions
如果 $x \in \mathbb{R}^n$ , $A x=b$ 并且定义 $J={j \mid x_j \neq 0}$ , $\operatorname{rank}\left(A_J\right)=|J|$ , 则 $x$ 被称作基本解 (basis solution).
如果 $x$ 是一个基本解, 并且 $x \ge 0$ , 那么 $x$ 被称作基本可行解 (basic feasible solution)
一个底 (basis) 是一个索引集 $B \subseteq{1, \ldots, n}$ , 满足 $\operatorname{rank}\left(A_B\right)=m$ 并且 $|B|=m$
给定底 $B$ , 满足 $A_B x_B=b$ , 并且对于所有 $j \notin B$ , $x_j=0$ 的 $x \in \mathbb{R}^n$ 被称作关联底 $B$ 的基本解
Facts
一个基本可行解满足了约束矩阵 $A$ 中的 $m$ 个等号约束
除此之外, 索引不在底 $B$ 中的 $x$ 的元素 $x_j$ 的值是 $0$ , 因此 $x \ge 0$ 的 $n$ 个非负约束中的 $n-m$ 个被等号满足.
也就是说, 一个基本可行解能等号满足至少 $n$ 个约束
Definition 25
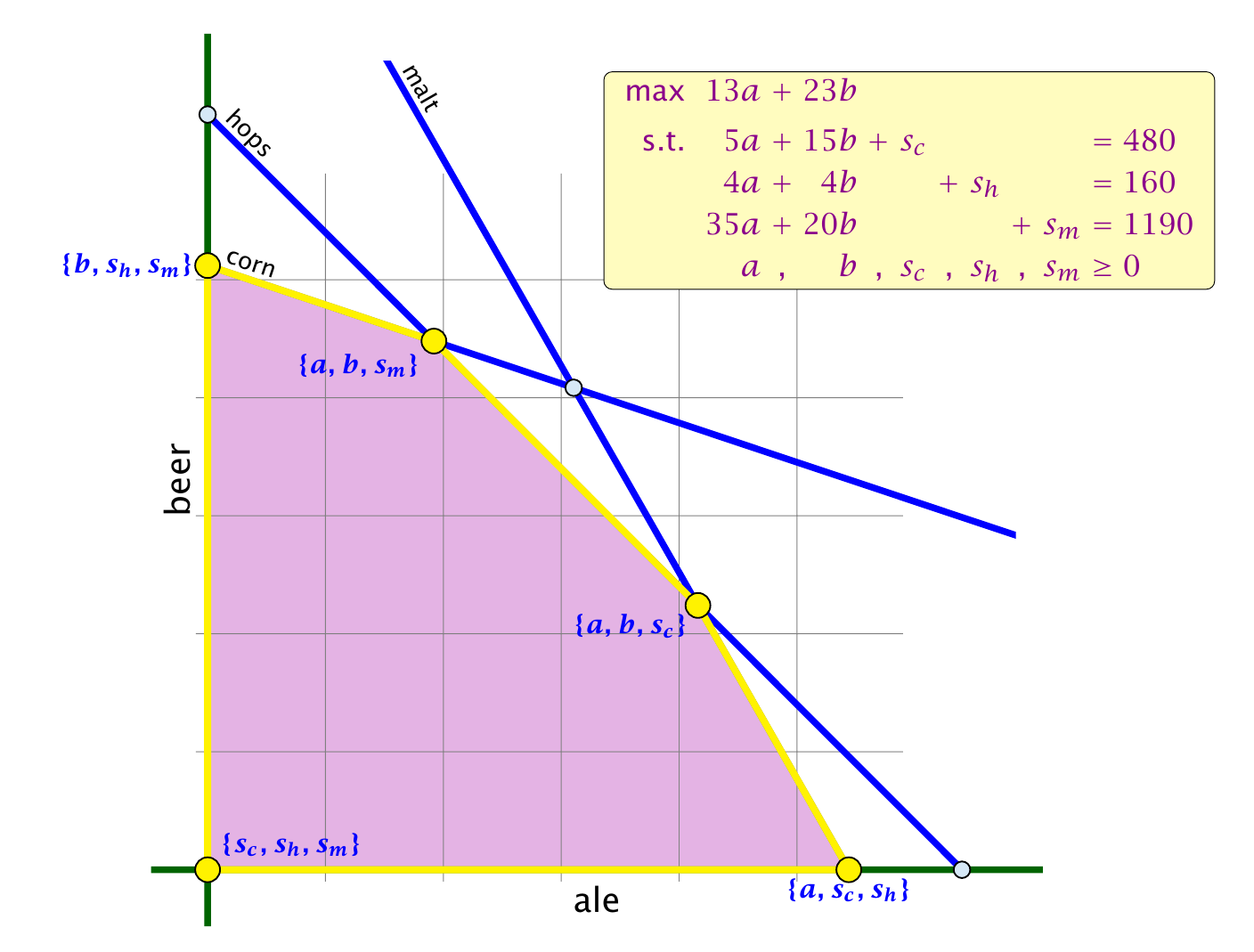
基于上述Facts, 对于一个有 $n$ 个变量的通用LP ($\max {c^T x \mid A x \leq b}$) , $x$ 是一个基本可行解如果 $x$ 是可行的并且存在 $n$ 个 (线性无关的) 约束是被等号满足的 (tight)
Illustration
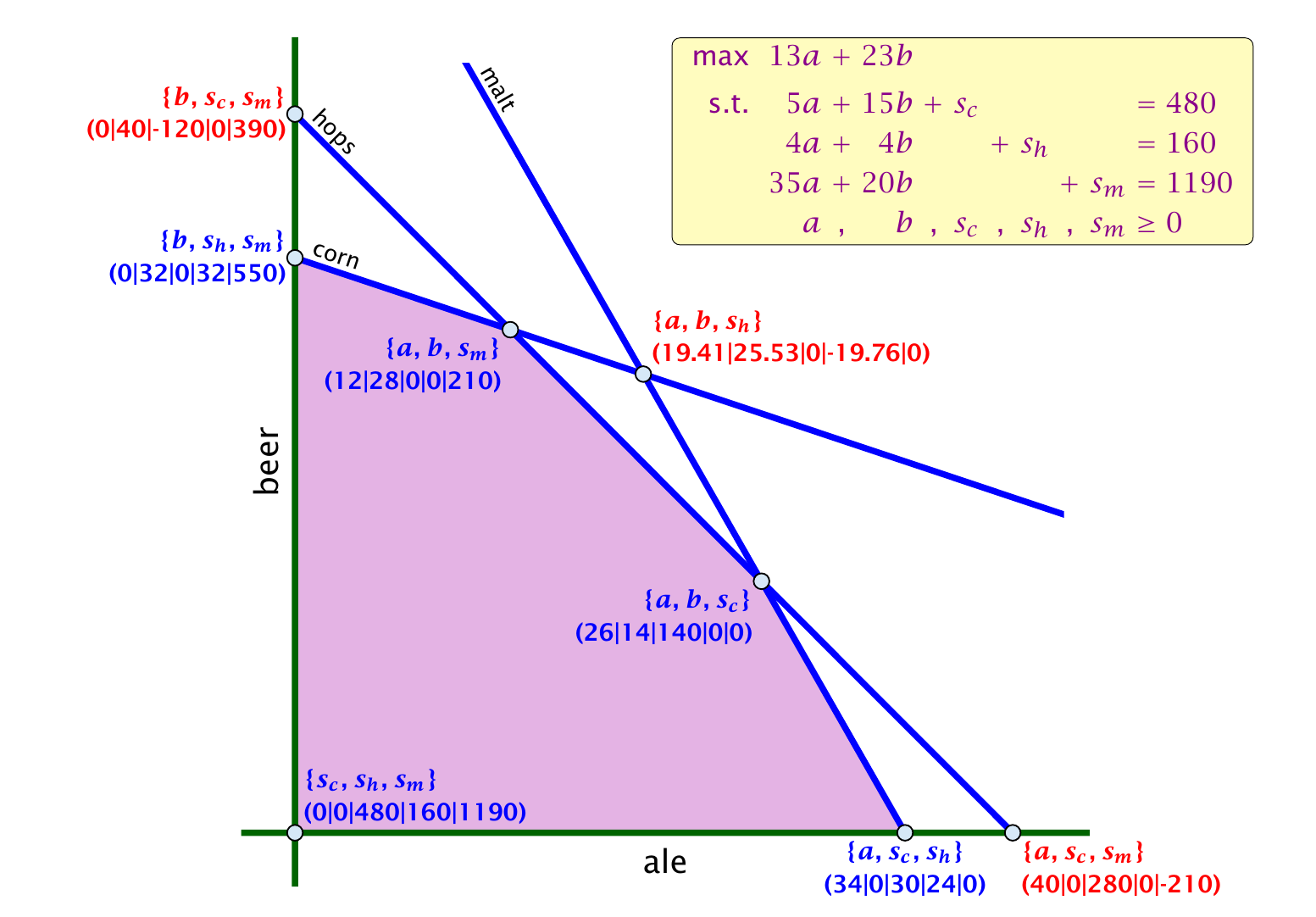
其中蓝色的是基本可行解, 红色的是基本解
Fundamental Questions
Is LP in NP? yes!
因为给定一个底 $B$ , 我们能在多项式时间内计算出他对应的基本解 $A_B^{-1} b$
Observation
我们能在 $\mathcal{O}\left(\left(\begin{array}{c}n \ m\end{array}\right) \cdot \operatorname{poly}(n, m)\right)$ 的时间复杂度内计算出最优解
最多只有 $\left(\begin{array}{c}n \ m\end{array}\right)$ 个底, 便利一次计算出最优解即可
如果LP不是有界的, 那么把要求(证)的那个 $c^Tx \leq \alpha$ 也加进去, 就能转换成有界的LP了
Simplex Algorithm
Idea
如果便利所有的基本可行解来求最优解太慢了
我们只需要从一个基本可行解开始, 经过与他相邻 (adjacent) 的基本可行解, 保证目标函数 (objective function) 不减少
两个基本可行解是相邻的, 如果他们对应的底只有一个变量不同
Pivoting Step (Example)
先进行一次小小的变形, 我们要保证在底中的变量 ( ${s_c, s_h, s_m}$ ) 的系数必须是 $1$ , 否则进行一次高斯消元
| 约束矩阵 | 状态 |
|---|---|
| $\begin{array}{rcrcrcrcrcrcl} \max \quad Z \\ \text { s.t. } \quad 13 a & + &23 b & & & & & & & - & Z & = & 0 \\ 5a & + & 15b & + & s_c & & & & & & & = & 480 \\ 4a & + & 4b & & & + & s_h & & & & & = & 160 \\ 35a & + & 20b & & & & & + & s_m & & & = & 1190 \\ a & , & b & , & s_c & , & s_h &, & s_m & & & \geq & 0 \end{array} $ | $\begin{aligned} & \text {basis}={s_c, s_h, s_m} \\ & a=b=0 \\ & Z=0 \\ & s_c=480 \\ & s_h=160 \\ & s_m=1190\end{aligned}$ |
这样我们的目标函数就是约束矩阵的第一行了
接下来我们从目标函数中取一个不在底中的并且系数是正的变量(必须是最大的那个, 否则会死循环), 这个例子中可供选择的有 ${a, b}$ , 但是 $b$ 的系数更大, 所以我们选 $b$ , 这变量叫做进入变量 (entering variable)
接下来我们保持 $a=0$ 不变, 增大 $b$ , 因为要维护约束约束矩阵, 所以底中的变量会变小, 我们增大 $b$ 到 $\theta$ 使得有一个底中的变量减小到了 $0$ (不可能有两个, 因为约束矩阵 $A$ 是行满秩的, 如果有两个的话说明 $A$ 的行是线性相关的, 就不是行满秩的了)
这里我们可以很容易的算出 $\theta=\min {480 / 15,160 / 4,1190 / 20}$ , 因为底中的变量的系数都是1
第一个被减到 $0$ 的底中的变量是 $s_c$ , 这个变量叫做离开变量 (leaving variable)
得到了进入变量和离开变量, 我们要对约束矩阵进行变换:
- 在除了第一行 (目标函数) 的行中, 首先将进入变量的系数变为 $1$
- 找到进入变量和离开变量都存在的那行, 消去除了这行的所有行中的进入变量 (这一步的目的是消去其他行不是底中的变量, 让底中的变量只出现一次)
- 更改状态, 将离开变量从底中剔除, 加入进入变量, 根据求得的 $\theta$ 改变变量的值
| 约束矩阵 | 状态 |
|---|---|
| $ \begin{array}{rcrcrcrcrcrcl} \max \quad Z \\ \text { s.t. } \quad \frac {16}{3} a & & & - & \frac{23}{15} s_c & & & & & - & Z & = & -736 \\ \frac{1}{3}a & + & b & + & \frac{1}{15}s_c & & & & & & & = & 32 \\ \frac{8}{3} a & & & - & \frac{4}{15}s_c & + & s_h & & & & & = & 32 \\ \frac{85}{3} a & & & - & \frac{4}{3}s_c & & & + & s_m & & & = & 550 \\ a & , & b & , & s_c & , & s_h &, & s_m & & & \geq & 0 \end{array} $ | $\begin{aligned} & \text {basis}={b, s_h, s_m} \\ & a=s_c=0 \\ & Z=736 \\ & b=32 \\ & s_h=32 \\ & s_m=550\end{aligned}$ |
重复以上步骤知道目标函数中的系数都是负的.
这里再走一步:
目标函数中现在只有 $a$ 的系数是负的, 所以我们选择 $a$ 作为进入变量
然后计算 $\theta = \min {3 \cdot 32,3 \cdot 32 / 8,3 \cdot 550 / 85}$ , 这里最小的是第三项, 所以我们选 $s_m$ 作为离开变量
| 约束矩阵 | 状态 |
|---|---|
| $ \begin{array}{rcrcrcrcrcrcl} \max \quad Z \\ \text { s.t. } \quad \& & & - & \frac{23}{15} s_c & & - & 2s_h & & & - & Z & = & -800 \\ & + & b & + & \frac{1}{10}s_c & - & \frac{1}{8}s_h & & & & & = & 28 \\ a & & & - & \frac{1}{10}s_c & + & \frac{3}{8}s_h & & & & & = & 12 \\ & & & & \frac{2}{3}s_c & - & \frac{85}{8}s_h & + & s_m & & & = & 210 \\ a & , & b & , & s_c & , & s_h &, & s_m & & & \geq & 0 \end{array} $ | $\begin{aligned} & \text {basis}={a, b, s_m} \\ & s_c=s_h=0 \\ & Z=800 \\ & b=28 \\ & a=12 \\ & s_m=210\end{aligned}$ |
此时目标矩阵中的变量的系数全是负的了, 所以程序结束, 我们找到的最优解是 $800$
Matrix View
按照上面说的, 需要把底中的变量的系数变成 $1$ , 并且在约束矩阵中只能出现一次:
那么基本可行解就是由 $x_N=0, x_B=A_B^{-1} b$ 组成
如果 $\left(c_N^T-c_B^T A_B^{-1} A_N\right) \leq 0$ , 我们就知道我们已经找到最优解了
Geometric View of Pivoting
一开始的底在原点, 然后往上走了一步, 再往右走了一步到达最优解
Algebraic Definition of Pivoting
给定底 $B$ 和他关联的基本可行解 $x^*$
选一个索引 $j \notin B$ , 把 $x_j^*$ 从 $0$ 增大到 $\theta \ge 0$
- 其他非底的变量应该不变, 为 $0$
- 底中的变量应该自适应改动以维护约束成立
也就是说从 $x^\ast$ 变成 $x^\ast + \theta \cdot d$
Requirements for $d$
- $d_j = 1$ (归一化)
- $d_{\ell}=0, \ell \notin B, \ell \neq j$
- $A\left(x^*+\theta d\right)=b$ 必须满足, 因为移动后也必须是可行解, 所以我们可以推出 $A d=0$
Definition 26 ( $j$ -th basis direction)
综上, $Ad = AB d_B+A{\ast j}=0$ , $A_{\ast j}$ 是约束矩阵 $A$ 的第 $j$ 列
$AB$ 的列是线性无关的, 所以 $A_B$ 是可逆的, 我们能直接推出 $d_B=-A_B^{-1} A{* j}$
$d_B$ 就是 $j$ -th basis direction
Definition 27 (Reduced Cost)
从 $x^\ast$ 移动到 $x^\ast+\theta \cdot d$ , 目标函数变化了 $\theta \cdot c^T d=\theta\left(cj-c_B^T A_B^{-1} A{\ast j}\right)$
我们定义: $\tilde{c}j=c_j-c_B^T A_B^{-1} A{\ast j}$ 是 $x_j$ 的reduced cost.
reduced cost是对每个 $j$ 都有定义的, 如果 $j \in B$ , 那么 $x_j$ 的reduced cost就是0, 因为我们不能选这个 $j$ 作为进入变量, 所以无法改变目标函数
Min Ratio Test
Q: What happens if the min ratio test fails to give us a value $θ$
by which we can safely increase the entering variable?
我们知道 $\theta = \min \left( \max \left( bi / A{i e}, 0 \right) \right)$ , 这里的 $A_{i e}$ 是第 $i$ 行中的在底中的变量的值 (具体看上面的步骤)
如果这些值中不是全是负的, 那么这个负值只会增大这个变量, 而不是减小, 所以是没有危险的
如果全是负的, 那么就没有离开变量选择了, LP就不是有界的了
Termination
在Simplex方法的一次迭代中, 目标函数的值是不会下降的, 但是他会保证一直上升吗?
答案是: 并不!
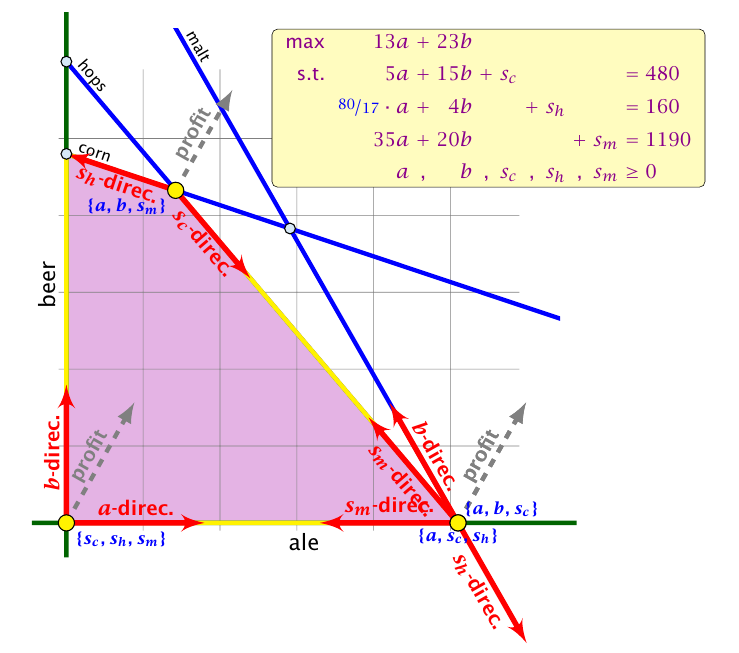
Definition 28 (退化 Degeneracy)
一个基本可行解 $x^\ast$ 是退化的, 如果集合 $J=\left{j \mid x_j^*>0\right}$ 满足 $|J|<m$
若干个基本可行解重合了, 如图右下角有三个点重合了
总结: 如何挑选每次迭代中加入到底中的那个下标?
- 我们可以选择一列 $e$ 作为进入变量, 如果 $\tilde{C}_e>0$ ($\tilde{c}_e$ 是 $x_e$ 对应的reduced cost)
- 标准选择是选 $\tilde{c}_e$ 最大的那个列 $e$
- 如果对所有 $i \in{1, \ldots, m}$ 都有 $A_{i e} \leq 0$ , 那说明最大值是无界的
- 否则, 选一个离开变量 $l$ 使得 $b{\ell} / A{\ell e}$ 在所有的 $A_{i e}>0$ 是最小的
- 如果有数个变量都同时是最小值, 那就到了一个退化的基本可行解
- 取决于 $l$ 的选取, Simplex方法可能会陷入死循环
Initial Solution
Lemma 29 (Optimality)
有一个底 $B$ 和一个基于 $B$ 的基本可行解 $x^\ast$ , $\tilde{c} \leq 0$ 能够得出 $x^\ast$ 是LP的最优解
Definition 30 (Duality)
主要线性规划(primal LP) $z=\max \left{c^T x \mid A x \leq b, x \geq 0\right}$ 的对偶问题(dual problem) 是 $w=\min \left{b^T y \mid A^T y \geq c, y \geq 0\right}$
Lemma 31
一个主要线性规划问题的对偶问题的对偶问题是他自己
$\begin{aligned} & w=\min \left{b^T y \mid A^T y \geq c, y \geq 0\right} \ & w=-\max \left{-b^T y \mid-A^T y \leq-c, y \geq 0\right}\end{aligned}$
$w$ 的对偶问题是:
$\begin{aligned} & z=-\min \left{-c^T x \mid-A x \geq-b, x \geq 0\right} \ & z=\max \left{c^T x \mid A x \leq b, x \geq 0\right}\end{aligned}$
Theorem 32 (Weak Duality)
$z=\max \left{c^T x \mid A x \leq b, x \geq 0\right}$ 和 $w=\min \left{b^T y \mid A^T y \geq c, y \geq 0\right}$ 是一对对偶问题, $x$ 是主要可行(primal feasible), 当且仅当 $x \in{x \mid A x \leq b, x \geq 0}$ ,
$y$ 是对偶可行(dual feasible), 当且仅当 $y \in\left{y \mid A^T y \geq c, y \geq 0\right}$
给定 $\hat{x}$ 是主要可行的, $\hat{y}$ 是对偶可行的:
通过这两个能推出:
又因为 $z$ 是主要可行的最大解, $w$ 是对偶可行的最小解, 就有: $z \leq w$
另外: 如果主要线性规划问题 $P$ 是无界的, 那么其对偶问题 $D$ 就是不可行的
Simplex and Duality
$z =\max \left{c^T x \mid A x=b, x \geq 0\right} $
$w =\min \left{b^T y \mid A^T y \geq c\right}$
是一组对偶问题, 这也代表: 在解一个主要线性规划问题的对偶问题的时候, 我们没有变量非负的限制
对主要线性规划问题进行改写:
$\begin{aligned} \max & \left{c^T x \mid A x=b, x \geq 0\right} \\ & =\max \left{c^T x \mid A x \leq b,-A x \leq-b, x \geq 0\right} \\ & =\max \left{c^T x \mid\left[\begin{array}{c}A \\ -A\end{array}\right] x \leq\left[\begin{array}{c}b \\ -b\end{array}\right], x \geq 0\right}\end{aligned}$
这里的最后一步就是把两个不等式写成矩阵形式
改写后的对偶问题为:
$\begin{aligned} \min & \left{\left[b^T-b^T\right] y \mid\left[A^T-A^T\right] y \geq c, y \geq 0\right} \\ & =\min \left{\left[b^T-b^T\right] \cdot\left[\begin{array}{c}y^{+} \\ y^{-}\end{array}\right] \mid\left[A^T-A^T\right] \cdot\left[\begin{array}{l}y^{+} \\ y^{-}\end{array}\right] \geq c, y^{-} \geq 0, y^{+} \geq 0\right} \\ & =\min \left{b^T \cdot\left(y^{+}-y^{-}\right) \mid A^T \cdot\left(y^{+}-y^{-}\right) \geq c, y^{-} \geq 0, y^{+} \geq 0\right} \\ & =\min \left{b^T y^{\prime} \mid A^T y^{\prime} \geq c\right}\end{aligned}$
Proof of Optimality Criterion for Simplex
假设我们有一个基本可行解 $x^\ast$, 其reduced cost为:
$\tilde{c}=c^T-c_B^T A_B^{-1} A \leq 0$
这也代表 $x^ast$ 是最优解 (Lemma 29)
我们对这个式子进行改写: $A^T\left(A_B^{-1}\right)^T c_B \geq c$
令 $y^\ast=\left(A_B^{-1}\right)^T c_B$
$\begin{aligned} b^T y^\ast & =\left(A x^\ast\right)^T y^\ast=\left(A_B x_B^\ast\right)^T y^\ast \\ & =\left(A_B x_B^\ast\right)^T\left(A_B^{-1}\right)^T c_B=\left(x_B^\ast\right)^T A_B^T\left(A_B^{-1}\right)^T c_B \\ & =c^T x^\ast\end{aligned}$
因为 $c^T \hat{x} \leq z \leq w \leq b^T \hat{y}$ 所以 $y^\ast$ 其实也是最优解
Strong Duality
$P=\max \left{c^T x \mid A x \leq b, x \geq 0\right}$
$n_A$ : 变量的个数( $A$ 的列数), $m_A$ : 约束的个数 ( $A$ 的行数)
我们也可以把变量非负这个约束加入约束矩阵 $A$ ( $ x \geq 0 \Rightarrow -x \leq 0$ )
然后新的LP: $\bar{P}=\max \left{c^T x \mid \bar{A} x \leq \bar{b}\right}$
$n{\bar{A}}=n_A, m{\bar{A}}=m_A+n_A$
新LP的对偶问题: $D=\min \left{\bar{b}^T y \mid \bar{A}^T y=c, y \geq 0\right}$
Theorem 33 (Strong Duality)
给定 $P$ 和 $D$ 互为对偶问题对, $z^\ast$ 和 $w^\ast$ 是这对问题的最优解, 那么:
Lemma 34 (Weierstrass)
给定 $X$ 是一个凸集, $f(x)$ 是在凸集 $X$ 上的一个连续的函数, 那么 $\min {f(x): x \in X}$ 存在
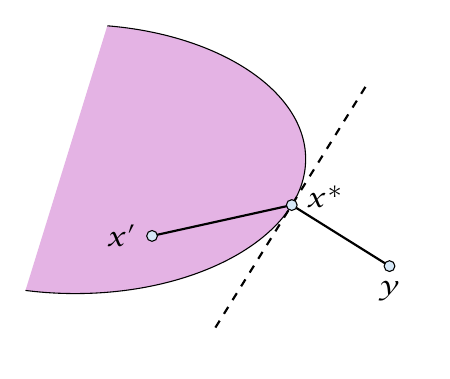
Lemma 35 (Projection Lemma)
给定 $X \subseteq \mathbb{R}^m$ 是一个非空的凸集, 并且 $y \notin X$. 那就存在一个凸集上到 $y$ 的距离最近的点 $x^\ast$ . 并且, 对所有 $x \in X$ , 都有 $\left(y-x^\ast\right)^T\left(x-x^\ast\right) \leq 0$
$f(x)=|y-x|$
但是此时还不能用Lemma 34, 因为 $X$ 可能不是有界的
解决方法: 因为 $X \neq \varnothing$ , 所以存在一个点 $x’ \in X$ , 定义 $X^{\prime}=\left{x \in X \mid|y-x| \leq\left|y-x^{\prime}\right|\right}$ , 此时这个 $X’$ 就是闭合的(closed)并且有界的(bounded)
这样我们就可以通过Lemma 34证明: 最近点必定存在.
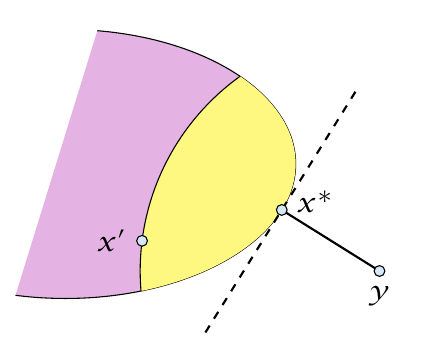
接下来证明 $\left(y-x^\ast\right)^T\left(x-x^\ast\right) \leq 0$
假设 $x^\ast$ 是最近点. 所以 对所有的 $x \in X$ , $\left|y-x^\ast\right|^2 \leq|y-x|^2$
根据凸集的性质: $x \in X$ 那么 对于所有的 $0 \leq \epsilon \leq 1$ , $x^\ast+\epsilon\left(x-x^\ast\right) \in X$ ( $x$ 和 $x’$ 的连线上的点)
改写一下上面的式子: $\left(y-x^\ast\right)^T\left(x-x^\ast\right) \leq \frac{1}{2} \epsilon\left|x-x^\ast\right|^2$
如果 $\epsilon \rightarrow 0$ 就得到了我们要证明的结论
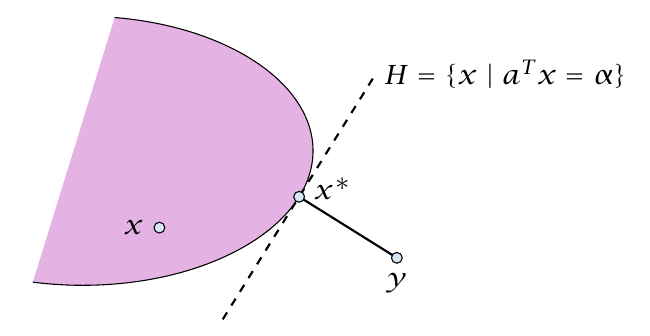
Theorem 36 (Separating Hyperplane)
给定 $X \subseteq \mathbb{R}^m$ 是一个非空的凸集, 并且 $y \notin X$. 那么一定存在一个分割超平面 $\left{x \in \mathbb{R}: a^T x=\alpha, a \in \mathbb{R}^m, \alpha \in \mathbb{R} \right}$ 将 $X$ 和 $y$ 分割开 (对于所有的 $x \in X$, $a^T y<\alpha ; a^T x \geq \alpha$)
$x^\ast \in X$ 是 $X$ 中距离 $y$ 的最近点
根据上面的定理, 对于所有的 $x \in X$, $\left(y-x^\ast\right)^T\left(x-x^\ast\right) \leq 0$
令: $a=\left(x^\ast-y\right)$ , $\alpha=a^T x^\ast$
对于所有的 $x \in X: a^T\left(x-x^\ast\right) \geq 0$ , 所以有 $a^T x \geq \alpha$
同时 $a^T y=a^T\left(x^\ast-a\right)=\alpha-|a|^2<\alpha$
Lemma 37 (Farkas Lemma)
给定 $A$ 是一个 $m \times n$ 的矩阵, 那么下面两个陈述仅有一个是真的:
- $\exists x \in \mathbb{R}^n$ , $A x=b, x \geq 0$
- $\exists y \in \mathbb{R}^m$ , $A^T y \geq 0, b^T y<0$
首先我们先证明上述两个陈述最多有一个是正确的
假设 $\hat{x}$ 满足第一天陈述, $\hat{y}$ 满足第二条, 那么有
所以不能两条都同时满足
现在假设第一条不满足
$S={A x: x \geq 0}$ 是矩阵 $A$ 的列的锥组合, 所以 $S$ 是闭合的, 凸的. 因为第一条不满足, 所以 $Ax \neq b$ , 所以 $b \notin S$
我们想要证明存在一个 $y$ , 满足 $A^T y \geq 0, b^T y<0$
让 $y$ 是分割 $b$ 和 $S$ 的半平面, 因此: $y^T b<\alpha$ 并且对于所有的 $s \in S$ , $y^T s \geq \alpha$
$0 \in S \Rightarrow y^T \cdot 0 \geq \alpha \Rightarrow \alpha \leq 0 \Rightarrow y^T b<0$
对于 $x \geq 0$ , $y^T A x \geq \alpha$ , 因此 $y^T A \geq 0$ (我们能随意指定 $x \geq 0$ )
Lemma 38 (Farkas Lemma; different version)
将两个陈述重写一下:
- $\exists x \in \mathbb{R}^n$ , $[A \quad I] \cdot\left[\begin{array}{c}x \\ s\end{array}\right]=b, x \geq 0, s \geq 0$
- $\exists y \in \mathbb{R}^m$ , $\left[\begin{array}{c}A^T \ I\end{array}\right] y \geq 0, b^T y<0$
Proof of Strong Duality
讲了这么就的辅助定理, 正菜终于端上来了
$P: z=\max \left{c^T x \mid A x \leq b, x \geq 0\right} $
$D: w=\min \left{b^T y \mid A^T y \geq c, y \geq 0\right}$
Theorem 39 (Strong Duality) 同Theorem 33
$\boldsymbol{z} \leq \boldsymbol{w}$ :
weak duality已经证明了
$z \geq w$ :
我们证明 $z<\alpha$ 能够推出 $w<\alpha$
| $\begin{array}{rrcr} \exists x \in \mathbb{R}^n & \\ \text { s.t. } & A x & \leq & b \\ & -c^T x & \leq & -\alpha \\ & x & \geq & 0 \end{array}$ | $\begin{array}{rrcr} \exists y \in \mathbb{R}^m ; v \in \mathbb{R} & \\ \text { s.t. } & A^T y-c v & \geq & 0 \\ & b^T y-\alpha v & < & 0 \\ & y, v & \geq & 0\end{array}$ |
因为我们这里假设的 $z<\alpha$ , 又因为 $z$ 是 $c^T x$ 的最大值, 所以 $c^T x$ 是不可能大于等于 $\alpha$ 的, 所以左边的不等式组是不可能被满足的, 根据Farkas Lemma, 那么右边的一定是可满足的
如果解 $y, v$ 满足 $v=0$ , 那么我们就可以推出
是可满足的
这玩意儿的根据Farkars Lemma对应的那个不等式组其实就是原来的LP, 因此我们就推出原来的LP是不可能被满足的, 而我们假设LP应该是有解的, 所以 $v \neq 0$ 必须满足
因此存在一个解 $y, v$ 满足 $v>0$
那么我们缩放整个不等式组 (同时缩放 $y$ 和 $v$), 让 $v=1$
因为这个不等式组是有解的, 因此存在 $y$ , $b^T y<\alpha$ , 因为 $w$ 是 $b^T y$ 的最小值, 所以有 $w<\alpha$ , 得证
Lemma 41 (Complementary Slackness)
假设LP $P=\max \left{c^T x \mid A x \leq b ; x \geq 0\right}$ 有解 $x^$ , 他的对偶问题 $D=\min \left{b^T y \mid A^T y \geq c ; y \geq 0\right}$ 有解 $y^$ , 那么:
- 如果 $x_j^*>0$ 那么 $D$ 中第 $j$ 个约束是等号满足的
- 如果 $D$ 中第 $j$ 个约束不是等号满足的, 那么$x_j^*=0$
- 如果 $y_i^*>0$ 那么 $P$ 中第 $i$ 个约束是等号满足的
- 如果 $P$ 中第 $i$ 个约束不是等号满足的, 那么$x_i^*=0$
Effiziente Algorithmen und Datenstrukturen II
http://example.com/2023/04/22/Effiziente-Algorithmen-und-Datenstrukturen-II/